Motion Planning in Understructured Road Environments with Stacked Reservation Grids
“We propose a new data structure named stacked reservation grid (SRG). To test our proposed approach, we build a dataset named the Berkeley Deep Drive Drone (B3D) dataset and describe how to develop a validation procedure using the B3D dataset. “
- Abstract
Motion planning of autonomous vehicles in understructured road environments is challenging owing to a lack of an efficient and analyzable representation of the contextual information. On one hand, idealistic representations like splines, while efficient and interpretable, are not versatile enough to encode the full complexity of the environment. On the other hand, high-fidelity representations like images, although rich in contents, are computationally expensive to decode and are not readily analyzable.
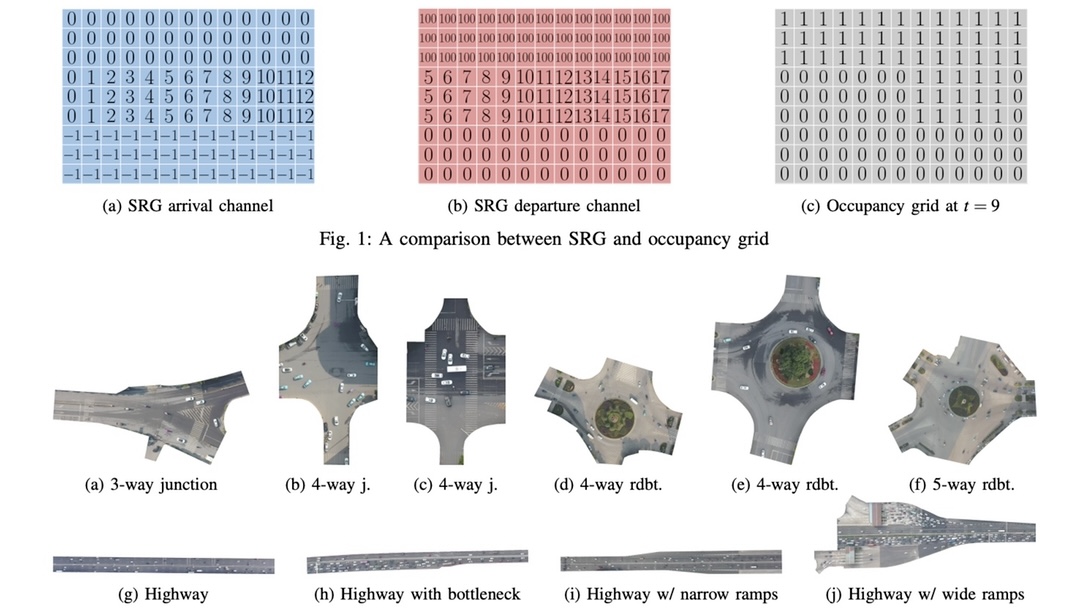
To address this problem, we propose a new data structure named stacked reservation grid (SRG). We show that SRG can encode a vast amount of information from the environment without loss of computational efficiency and analytical tractability. We first define SRG by drawing a comparison with the classical data structure, i.e., the occupancy grid. Next, we describe how to compute SRG offline from a continuous history of occupancy grids. After, we propose a neural network model to estimate SRG from a recent motion history of the surrounding objects.
Finally, we show that SRG can be efficiently applied in a linear program to solve motion planning. To test our proposed approach, we build a dataset named the Berkeley Deep Drive Drone (B3D) dataset and describe how to develop a validation procedure using the B3D dataset. The dataset and related codes will be open sourced at https://fywu85.github.io/b3d/.
